شبیهساز NexROBO؛ تجربه واقعی کنترل ربات بدون سختافزار
با نرمافزار رایگان شبیهساز ربات NexROBO از شرکت NEXCOM میتوانید عملکرد رباتهای صنعتی را بهصورت عملی تجربه کنید. این نرمافزار به کاربران اجازه میدهد کنترل و برنامهنویسی یک ربات مفصلی ۶ محوره را بدون نیاز به بازوی ربات فیزیکی یاد بگیرند و آزمایش کنند؛ راهکاری ایدهآل برای آموزش، توسعه و تست اولیه سیستمهای رباتیک.

NexROBO چیست؟
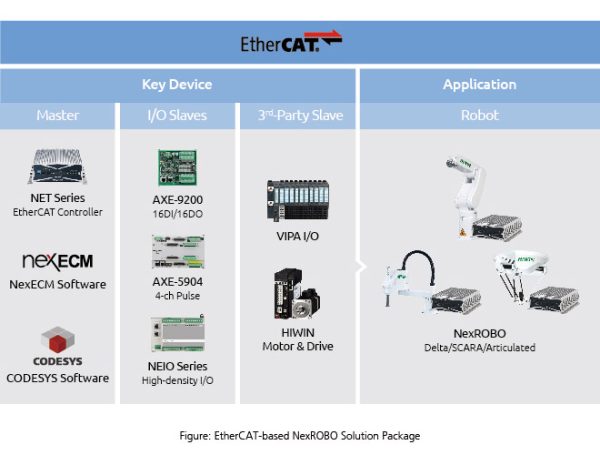
NexROBO یک راهکار رباتیک باز مبتنی بر EtherCAT است که تمامی اجزای یک سیستم ربات صنعتی کامل را در بر میگیرد؛ از پلتفرم کنترلر و نرمافزار کنترل ربات گرفته تا بدنه و ساختار ربات.
نرمافزار شبیهساز NexROBO با شبیهسازی دقیق عملکرد یک ربات مفصلی ۶ محوره، امکان بررسی مسیر حرکت و رفتار ربات را قبل از اجرای واقعی فراهم میکند. این رویکرد، زمان توسعه درایوهای موتور، کنترلرهای آزمایشگاهی و کدنویسی سیستمهای کنترلی را بهطور چشمگیری کاهش میدهد.
در نتیجه، توسعهدهندگان میتوانند بهجای درگیری با جزئیات سختافزاری، تمرکز خود را بر طراحی الگوریتمها و منطق هوشمند ربات قرار دهند.
ویژگیهای کلیدی شبیهساز NexROBO
کنترل رباتیک بلادرنگ با پشتیبانی EtherCAT
EtherCAT یکی از شناختهشدهترین پروتکلهای فیلدباس صنعتی است که ارتباطی پایدار و بلادرنگ فراهم میکند. راهکار رباتیک NexROBO با بهرهگیری از دقت بالا و پهنای باند مناسب EtherCAT، کنترل رباتها را در چرخه زمانی ۱ میلیثانیه امکانپذیر میسازد؛ موضوعی حیاتی برای کاربردهای دقیق صنعتی.
پشتیبانی از چند زبان برنامهنویسی
راهکار EtherCAT شرکت NEXCOM از زبانهای C/C++ و استاندارد IEC 61131-3 پشتیبانی میکند. این قابلیت، انعطافپذیری بالایی برای توسعهدهندگان با محیطها و ابزارهای مختلف فراهم کرده و فرآیند توسعه نرمافزارهای رباتیک را سادهتر میکند.
شبیهسازی مسیر و حرکت پیش از اجرا
نرمافزار NexROBO امکان شبیهسازی مسیر حرکتی یک ربات مفصلی ۶ محوره را همراه با نمایش دقیق حرکات فراهم میکند. حتی بدون وجود بازوی ربات فیزیکی، میتوان با اتصال به ۶ درایو و موتور EtherCAT، برنامههای کنترلی را آزمایش و اعتبارسنجی کرد. این قابلیت، ریسک خطا در اجرای واقعی ربات را به حداقل میرساند.
سازگاری گسترده با انواع ربات و درایو
NexROBO از رایجترین ساختارهای ربات صنعتی پشتیبانی میکند، از جمله:
- رباتهای مفصلی ۶ محوره
- رباتهای SCARA چهار محوره
- رباتهای دلتا سه یا چهار محوره
این تنوع، انتخاب درایو و پیادهسازی ربات صنعتی متناسب با نیاز پروژه را بسیار ساده میکند.
انواع رباتهای پشتیبانیشده
- ربات مفصلی شش محوره
- ربات SCARA چهار محوره
- ربات دلتا سهمحوره / چهارمحوره
درایوهای EtherCAT سازگار با NexROBO
- Yaskawa Sigma-5
- HIWIN D1 و D2
- OMRON R88D
- Delta A2E
- Servotronix CDHD
- Sanyo PB4D
- Panasonic Minas A5B
- Mitsubishi MR-J3-T04